Activities
UNEXMIN
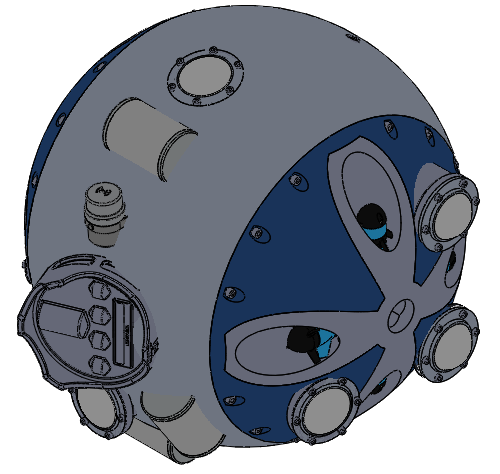
Autonomous Underwater Explorer for Flooded Mines

UNEXMIN is developing a novel
robotic system for the autonomous exploration and mapping of Europe’s flooded
mines. The Robotic Explorer (UX-1) will use non-invasive methods for
autonomous 3D mine mapping for gathering valuable geological and
mineralogical information. This will open new exploration scenarios so that
strategic decisions on the re-opening of Europe’s abandoned mines could be
supported by actualised data that cannot be obtained by any other ways.
The multi-robot platform will
represent a new technology line that is made possible by recent developments
in autonomy research that allows the development of a completely new class of
mine explorer service robots, capable of operating without remote control. Such robots do not exist nowadays; UX-1 will be the first of its kind.
Research challenges are related to miniaturisation and adaptation of deep sea
robotic technology to this new application environment and to the
interpretation of geoscientific data.
The major objectives will be
supported by a science and technology merger of deep sea robotics solutions
with user’s requirements from the mining industry. They will lead to a fine
adaptation of UX-1 so that the novel developed technology could best serve
end-users.
Reference:
690008
Duration: February 2016 to October 2019
Coordinator:
Miskolci Egyetem (Hungary)
Funding agency:
European Union
Programme:
H2020
Type of Action:
Research and Innovation Action
(RIA)
Topic:
SC5-11d-2015 (New sustainable
exploration technologies and geomodels)
Website: www.unexmin.eu