Activities
FLEXUS
Flexible Unmanned Surface Vehicles for the
Internet of Moving Things
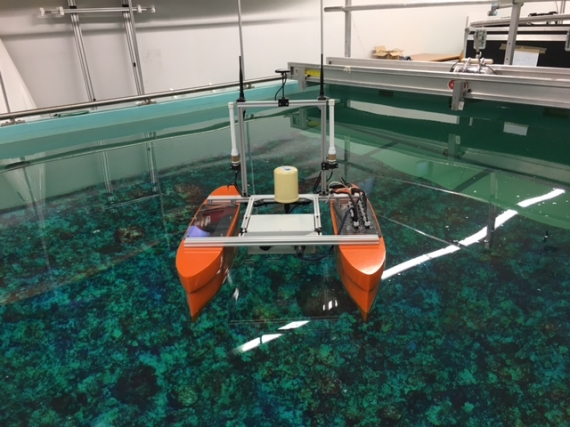
FLEXUS aims at
extending RAWFIE experimental infrastructure by providing a set of innovative
high manoeuvrable, small-sized, one-man-portable Unmanned Surface Vehicles
(USVs), which will support coordinated networked operations and novel above
water communications technologies. This USVs swarm will extend and enrich the
type of test scenarios for water-based IoT platforms, where M2M
(Machine-to-Machine) and Internet of Moving Things applications may use
long-range single-hop communications and multi-hop radio networks. The work in
this sub-project is carried out by a research team with solid know-how and
extensive research work on unmanned vehicles and communications, including
simulation, prototyping, development of unmanned vehicles, and experimental testing
skills, gained in past and ongoing projects, including FP7 CONFINE (FIRE
project), ICARUS, and SUNNY, and H2020 VAMOS and STRONGMAR.
The FLEXUS project is
funded by the project RAWFIE (Road-, Air-, Water-based Future Internet
Experimentation), which aims to create a federation of different network
testbeds that will work together to make their resources available under a
common framework.
Reference: 645220 (RAWFIE)
Duration: September 2016 to February 2019
Coordinator: INESC TEC (Portugal)
Funding agency:
European Union
Programme:
H2020
Type of Action:
Research and Innovation Action
(RIA)
Topic: ICT-11-2014
- FIRE+