Activities
ENDURE
Enabling Long-Term Deployments of Underwater
Robotic Platforms in Remote Oceanic Locations

The objective of this project
is to develop and demonstrate a cost effective solution for recharging
autonomous underwater vehicles used in remote oceanic areas, including
deep-sea deployments. The ultimate objective is to support the collection of
marine environment and human activities data for long-periods of time.
The ENDURE implementation
approach is underpinned in three main components:
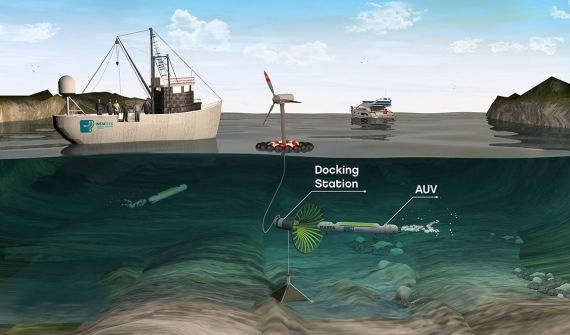
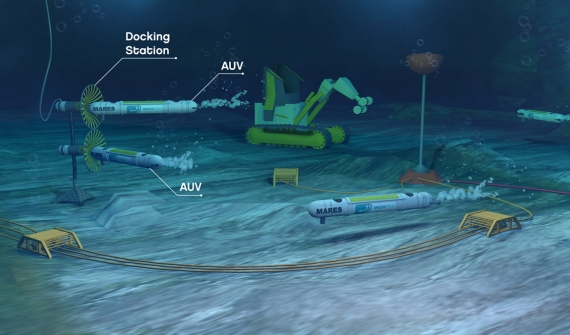
- docking maneuver, based on a novel vision based AUV positioning subsystem;
- wireless battery
recharging subsystem, capable of tolerating misalignments;
- Wi-Fi based high-bandwidth short range communication subsystem, for fast data downloading.
The proposed solution consists in having the underwater charging station (UCS) moored to the seabed and also connected to a surface platform that generates energy. This architecture allows for a significant reduction of the impact of surface waves on the movement of the UCS. Offshore conditions imply the use of a self-sustaining platform, capable of energy production. The platform will be able to generate energy for recharging all underwater smart platforms, as well as, receiving the collected data and transmitting it to shore.
Reference:
PT02-0024
Duration:
July 2015 to March 2017
Coordinator:
INESC TEC (Portugal)
Funding agency:
EEA Grants
Programme:
Integrated Marine and Coastal
Management (PT02)
Website:
endure.inesctec.pt